
国内初!空港制限区域内における自動運転レベル4を実用化
羽田空港での無人貨物搬送を国内線定期便にて運用開始します
全日本空輸株式会社
株式会社豊田自動織機
|

全日本空輸株式会社(本社:東京都港区、代表取締役社長:井上慎一、以下「ANA」)は、2025年12月より、株式会社豊田自動織機(本社:愛知県刈谷市、取締役社長:伊藤浩一、以下「豊田自動織機」)製の自動運転トーイングトラクター※13台を、羽田空港の国内貨物搬送へ導入し、国内線定期便で運用を開始します。空港制限区域※2内における自動運転レベル4※3実用化は国内初です。
この自動運転トーイングトラクターは、空港内全域における様々な環境・条件変化に対応できるように、自己位置推定や障害物検知システムを高性能化・冗長化しています。また、高い安全性が求められるレベル4の自動走行において、異常時にも迅速に対応できるよう車両の周囲の状況を把握する遠隔監視機能を搭載しています。12月時点の導入台数は3台で、2025年度中にさらに3台の増車を予定しています。
※1 空港等で、手荷物・貨物を収容した荷車・コンテナ等を牽引する車両
※2 滑走路その他の離着陸区域、誘導路、エプロン、管制塔その他、立ち入りが制限されたエリア
※3 特定条件下における完全自動運転。特定条件下においてシステムが全ての運転タスクを実施
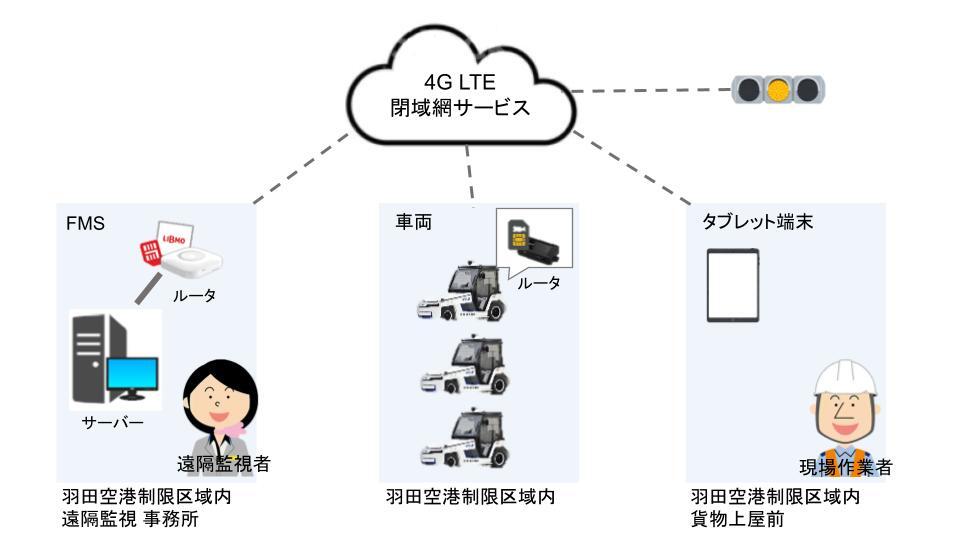
運用面では、複数台車両を用いた効率的なオペレーションの実現を図るため、豊田自動織機がANAの協力のもと開発した「Fleet Management System(以下、FMS)」を導入しています。FMSは車両への搬送指示・車両の運行管理に加え、限られたスペースを効率的に使用するための出発・到着レーンの自動割り当て、信号機制御との自動連動を行い、最新情報をタイムリーに一元化することができます。
【FMSの運用イメージ】
FMSでは、車両状態監視、車両への搬送指示、搬送前工程担当者への搬送支援指示(出発位置への車両セット等)、信号機制御と連動し、効率的なオペレーションを実現。
【無人貨物搬送の概要】
| 場所 | 羽田空港 制限区域内 |
|---|---|
| 自動運転コース |
・第2ターミナル60・61・65番スポット〜東貨物上屋間(片道 約1.5km) 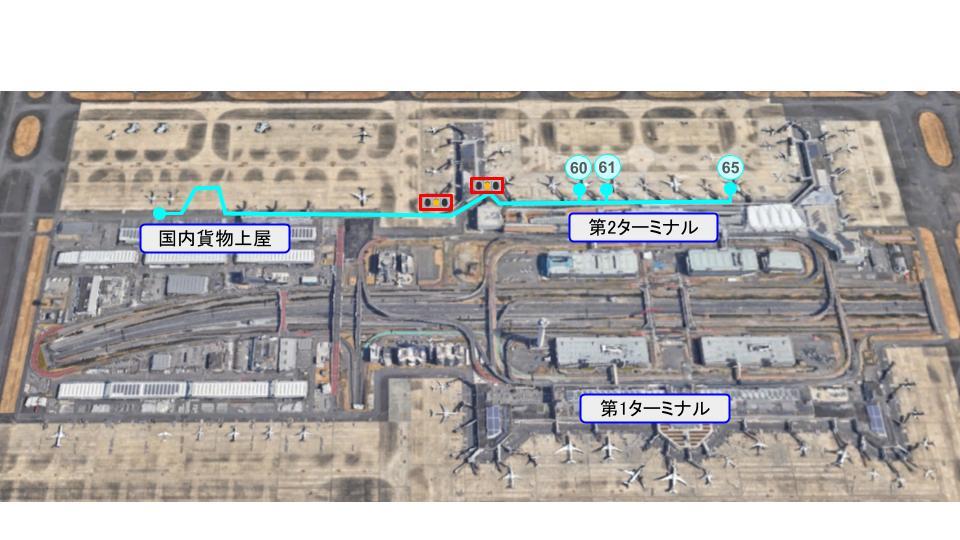 |
| 車両 | 豊田自動織機製 自動運転トーイングトラクター(3ATE25) 3台 ※2025年度中に3台増車予定 |
| 速度(最大) | 自動運転時:15km/h、有人運転時:25km/h |
| けん引重量(最大) | 自動運転時:13t、有人運転時:27t |
| 制御技術 | 路面パターンマッチング(RSPM®)※4 GNSS(高精度衛星測位)、3D LiDAR※5、磁気誘導※6 |
ANAと豊田自動織機は、2017年より空港イノベーション課題を共有し、2019年以降、様々な実証実験や試験運用を重ね、オペレーション上の課題について、運用面・機能面の改善を図り、今回の実用化に至りました。
<参考>
■2021年3月22日プレスリリース
https://www.toyota-shokki.co.jp/news/2021/03/22/004518/index.html
■2024年7月16日プレスリリース
https://www.toyota-shokki.co.jp/news/2024/07/16/008691/index.html
国土交通省航空局による航空イノベーション推進の一環として、今後の空港業務の持続的な発展に向けた自動運転トーイングトラクターの導入範囲の拡大・増車に向けた取り組みを、今後も両者にて進めてまいります。
※4 車両に搭載したカメラで撮影した路面画像と事前に作成した路面画像マップデータをマッチングすることで、 車両の位置・姿勢情報を取得する技術
RSPM®:「Road Surface Pattern Matching」は登録商標
※5 対象物にレーザー光を照射し、その反射光を測定することで対象物までの距離を正確に測定できるセンサで、車両周辺状況の把握に使用
※6 路面に敷設された磁気マーカの位置を車両に搭載された磁気センサで検知し車両位置を取得する技術