
豊田自動織機、自立して動く2輪型搬送用人協調ロボットを開発
~小型化により省スペースで人と作業、量産工程に導入~
 【ACインバーターを運んでいる2輪型搬送用人協調ロボット】
【ACインバーターを運んでいる2輪型搬送用人協調ロボット】
株式会社豊田自動織機は、工場内で製品などを搬送する2輪型搬送用人協調ロボットを開発し、当社生産拠点の量産ラインでの稼働を開始しました。このロボットは、狭い通路でも作業者と共存できるコンパクトさと、万が一、人と接触した場合には衝撃を逃がす特性を備え、当該拠点において人と同じエリアでの作業が可能となりました。現在はカーエレクトロニクス製品を生産する安城工場のACインバーター製造ラインで、組立・検査後の製品を出荷工程に搬送する作業を担っており、同ラインでこれまで人が行っていた搬送作業の無人化を実現しました。2輪でバランスを取りながら動くロボットが量産現場に導入されるのは、国内初※1となります。
製造現場の人手不足を受け、近年は移動式協働ロボットや、搬送ロボットの導入も進んでいます。しかし一般的には、安定性を高めるために車輪の数を増やしたり機台を大きくしたりして機体が大型化する傾向があるため、狭いエリアでの利用には制限があります。また、2輪ロボットは機体の小型化が可能ですが、その反面、モノを持ち上げた際に倒れやすくなるという課題が生じます。
今回開発した人協調ロボットは、慶應義塾大学の村上俊之教授と共同開発した、重心を推定し姿勢の安定性向上につなげる制御技術により、ロボットの占有面積を人と同程度まで小さくすると同時に、自立しながらの搬送を可能にしました。モノを持ち上げる時や運ぶ時の重心の変化や倒れる力を推定し、均衡する力を車輪にかけることで、姿勢を維持する上での優れた安定性を実現します。
合わせて、万が一、人が接触した際の軽い力も検知して、減速・停止動作へと移行する制御技術も確立しました。これらの技術を組み合わせ両立することで、安城工場では、幅1mほどの狭い通路でもロボットと人が安心してすれ違うことができるようになり、設備や工場内のレイアウトを変更することなく、搬送作業の自動化が可能となりました。
人手不足が深刻化するとともに、人が担ってきた作業の自動化ニーズは高まっています。特に工場のレイアウトなどを変更せずに自動化技術を取り入れたいという要望は多く、今回の人協調ロボットはその一助として貢献が見込めます。
今後は、社内外と連携しながら重量物への対応や作業範囲の拡大など改良を進め、製造現場や物流現場における人協調ロボットの導入拡大や、モノの移動の領域における技術革新をめざしてまいります。
※1 当社調べ
<従来の搬送ロボットと2輪型搬送用人協調ロボットの違い>
|
既存 |
2輪ロボット |
|
| 底面積 | (例)約3,000cm2 | 1,320cm2 |
| 厚み | (例)約60cm | 24cm |
| 高さ | (例)約130cm |
100cm |
| 人との協調動作 | あり | あり |
| 荷役機能 | なし | あり |

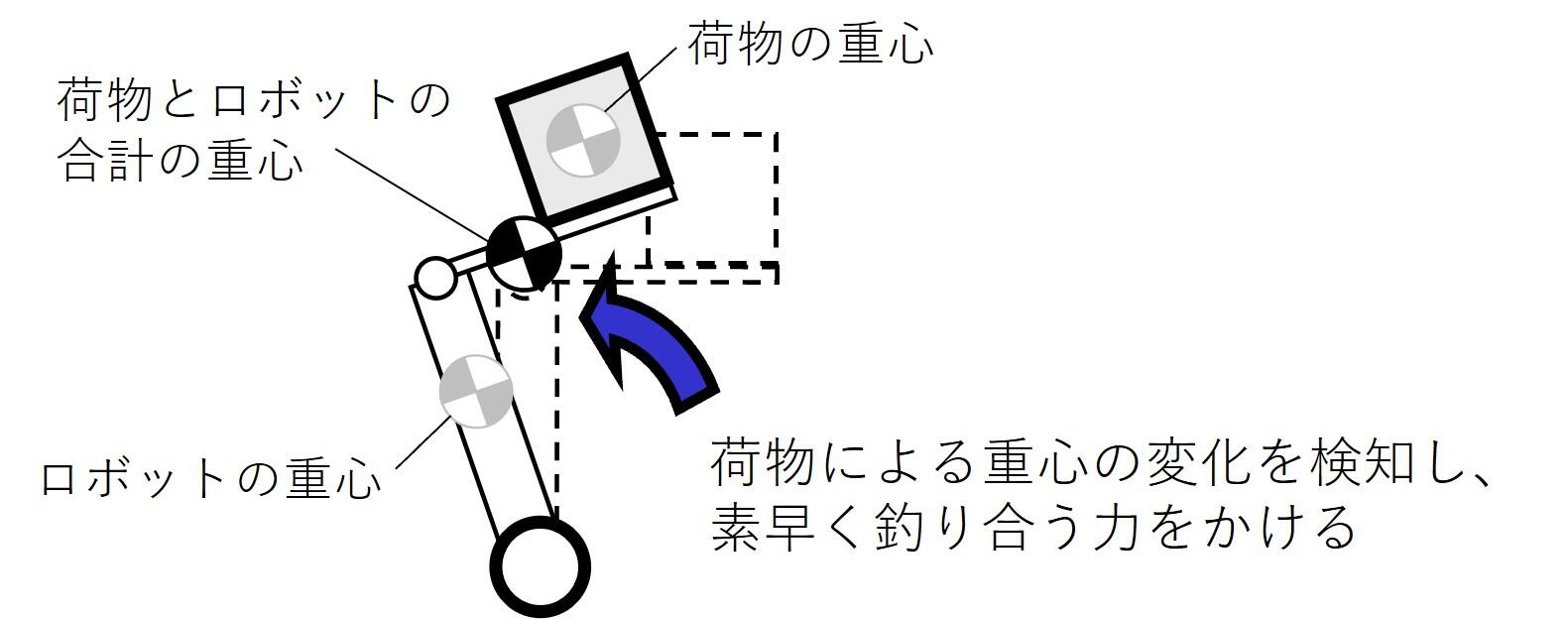 【不安定な姿勢を安定制御する技術の概要】
【不安定な姿勢を安定制御する技術の概要】